[BoostCamp AI Tech / Pre-Course 2] 딥러닝 기본 - Modern Convolutional Neural Networks
네이버 부스트코스의 Pre-course 강의를 기반으로 작성한 포스트입니다.
AlexNet
ILSVRC에서 2012년 우승한 모델이다.
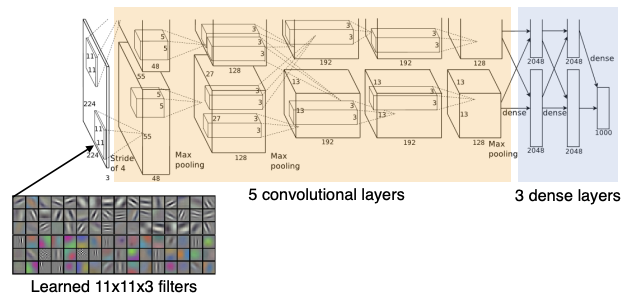
여러 필터 중 하나로 11x11을 사용했는데, 이렇게 하면 하나의 커널이 볼 수 있는 영역은 커지지만, 상대적으로 더 많은 파라미터가 필요하므로 그렇게 좋은 선택은 아니다.
모델의 핵심 포인트는 다음과 같다.
- Rectified Linear Unit(ReLU) 활성함수 사용
- 선형 모델의 성질을 보존: $x>0$이면 gradient가 선형모델과 동일하다.
- 경사하강법으로 최적화하기 쉽다.
- 일반화 성능이 좋다(실험결과)
- 기울기 소실 문제(Vanishing Gradient Problem)를 해결하였다.
- GPU Inplementation (2개의 GPU 사용) - 당시 하드웨어 기술의 메모리 부족으로 인하여 2개의 GPU를 사용하였다.
- Local response normalization, Overlapping pooling
- 지금은 잘 사용되지 않는다.
- Data augmentation
- Dropout(p=0.5)
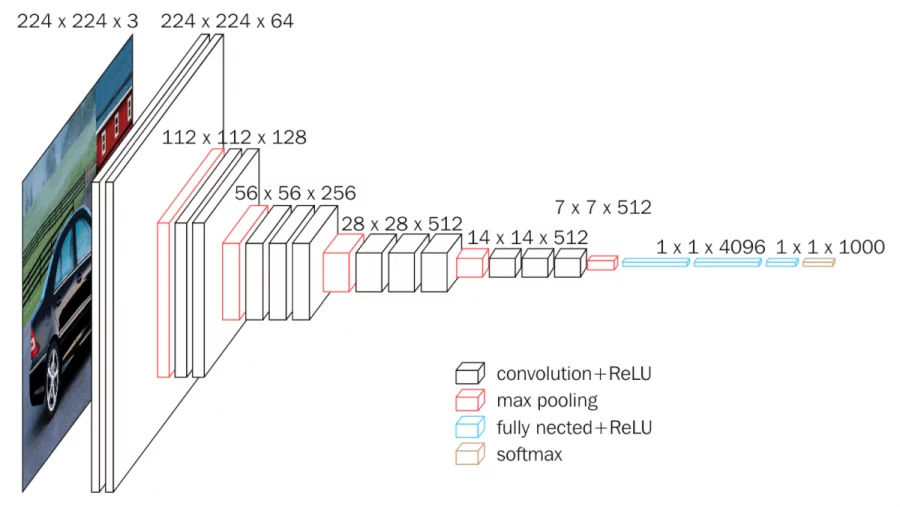
VGGNet
2014년도 ILSVRC에서 준우승한 모델이다.
모델의 핵심포인트는 다음과 같다.
- 3x3 필터(스트라이드 1)을 사용하고 depth를 늘렸다.
- 전연결계층에서 1x1 convolution 연산을 사용했다.
- Dropout(p=0.5)
- 계층 수에 따라 VGG16, VGG19로 나뉜다.
모든 레이어에서 필터를 3x3으로 통일하였다. 이것은 어떤 의미를 가질까?
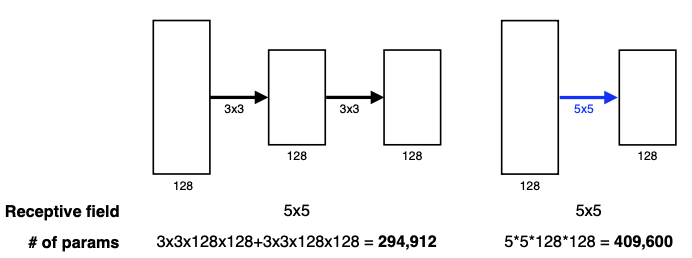
필터가 크다는 것은, 순전파 과정에서 하나의 convolution feature 값을 얻기 위해 고려할 수 있는 입력의 spatial dimension, 즉 수용영역(Receptive Field)이 커진다는 말이다.
만약 3x3 필터를 두 번 사용하게 된다면, 결국 5x5를 한번 사용하는것과 수용영역 차원에서는 동일하다. 3x3을 하나의 셀로 축소시킨것을 다시 3x3개 모아서 축소시키기 때문이다.
그러나 파라미터 개수에는 큰 차이가 있다. 입력, 출력의 채널이 각각 (128,128)이라고 생각해보자.
\[\begin{align*} 3 \times 3 \times 128 \times 128 + 3 \times 3 \times 128 \times 128 &= 294, 912 \\ 5 \times 5 \times 128 \times 128 &= 409,600 \end{align*} \]따라서 같은 수용영역을 커버하면서 파라미터의 개수를 줄이기 위해서는 3x3으로 계층을 한번 더 쌓는것이 낫다.
이러한 이유로 최근에는 대부분 필터의 크기가 3x3, 커봤자 7x7을 넘지 않는다.
GoogLeNet
2014년도 ILSVRC에서 우승한 모델이다.

22단으로 이루어져 있으며, 비슷한 네트워크가 전체 네트워크 내부에 여러번 들어가 있다. 이를 Network in Network, NiN 구조라고 부른다.
입력값이 Convolution 연산으로 들어가기전에 1x1 Conv를 거치는데, 이를 Inception Block이라고 하며 GoogLeNet 모델에서 가장 중요한 부분이다. Inception Block을 이용하여 파라미터 숫자를 줄일 수 있게 된다. 왜 그럴까?

1x1 Convolution이 채널방향으로(channel-wise) 차원을 축소하는 효과가 있기 때문이다.
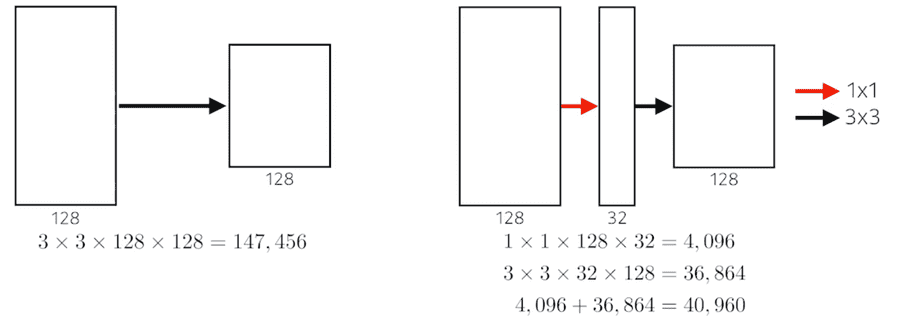
입력과 출력의 채널도 같고 , 수용영역도 같지만 1x1 convolution을 중간에 추가하는 것만으로 파라미터의 개수는 1/3보다 더 줄어들었다.
AlexNet, VGGNet, GoogLeNet 중 가장 파라미터가 작은 모델은 GoogLeNet이다.
- AlexNet (8-layers) : 60M
- VGGNet (19-layers) : 110M
- GoogLeNet (22-layers) : 4M
GoogLeNet이 가장 모델이 깊은데도 불구하고 가장 작은 파라미터를 갖을 수 있는 이유는 dense layer을 줄이고 1 $\times$ 1 Convolution을 이용해 feature dimension을 줄였기 때문이다.
ResNet
2015년도 ILSVRC에서 우승한 모델이다.
신경망의 깊이가 깊을수록, 학습하기는 더 어려워진다.
- 오버피팅은 일반적으로 파라미터 개수가 너무 많을 경우 일어난다.
- 그러나 깊이가 깊은 경우에는 오버피팅이 일어나지 않음에도 불구하고 학습 에러에 비해 테스트 에러가 훨씬 크게 나온다.

그래서 ResNet은 identity map(skip connection)이라는 것을 추가했다. 입력값으로 들어온 x를 convolution layer 한 층의 출력값에 더해주는 것이다. 이렇게 만든 block을 Residual Block이라고 한다.

기존의 신경망은 입력값 $x$를 목표 출력값 $y$로 매핑하는 함수 $H(x)$를 얻는것이 목표였는데, ResNet은 $F(x)+x$를 최소화시키는것이 목표다. 이 때 $x$는 정해진 상수이므로 $F(x)$를 최소화해야한다. $F(x) = H(x)-x$, 즉 잔차(Residual)이므로 잔차를 최소화한다고 하여 ResNet이라는 이름이 붙게 된다.
이렇게 학습시키게 되면, 이미 배웠던 내용 $x$를 제외한 차이점 $f(x)$만을 학습하면 되므로 학습이 더 잘이루어지게 된다.

이처럼 identity map을 사용하면 더 깊은 신경망을 쌓을 수 있는 가능성을 열어주었다.

이 때, 위의 Simple Shortcut과 같은 방식으로 진행하려면 두번의 conv를 거치고 난 뒤 BN까지 진행하고 나서의 (채널)차원이 기존의 입력값 x와 같아야한다. 만약 차원이 다르다면, 이를 맞춰주기 위해 1x1 Conv로 채널을 맞춰주게 된다. 이를 Projected Shortcut이라고 한다.
- Projected Shortcut이 자주 사용되지는 않으며, 일반적으로
Simple Shortcut을 많이 사용한다.
또, ResNet은 Batch Normalization이 Convolution 뒤에 일어난다는 특징이 있다. 다만, Batch Normalization을 ReLU 뒤에 넣는것이 더 학습효과가 좋다는 논쟁도 있다. 논문에서는 위의 이미지와 같은 순서로 수행한다.
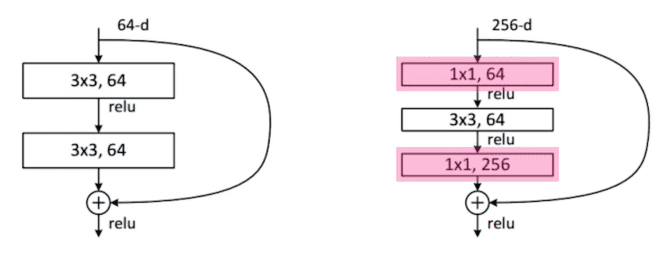
3x3 Conv를 수행할 때, Conv의 파라미터 개수는 [3$\times$3$\times$입력채널$\times$출력채널]이다. 파라미터의 수를 줄이기 위해 1x1 Conv로 입력채널을 줄여서 넣고, 출력 후에는 채널을 늘릴 수도 있을 것이다. 이를 Bottleneck architecture라고 한다.
궁극적으로 깊은 레이어를 쌓음과 동시에 파라미터의 수를 줄이기 위해 $1\times$1 convolution을 이용해 채널의 수를 줄이고 $3\times3$ convolution 또는 $5\times5$ convolution을 통해 receptive field를 키워 $1\times$1 convolution 로 다시 원하는 원하는 채널을 맞추는 방식을 이용한다.
DenseNet
ResNet의 Residual Block에서 x값을 더해(addition)주면 두 값이 섞이게 된다. 그래서 이 과정을 연쇄적으로 잇는 것(concatenation)으로 대체한다.

문제는 concatenation 하면 할수록 채널수가 점점 기하급수적으로 커진다는데에 있다. 채널 수가 많아지면 Conv 연산 시 파라미터수가 자연스레 많아지므로, 이를 해결하기 위해 중간에 채널숫자를 줄여주는 Transition Block을 끼워넣는다.
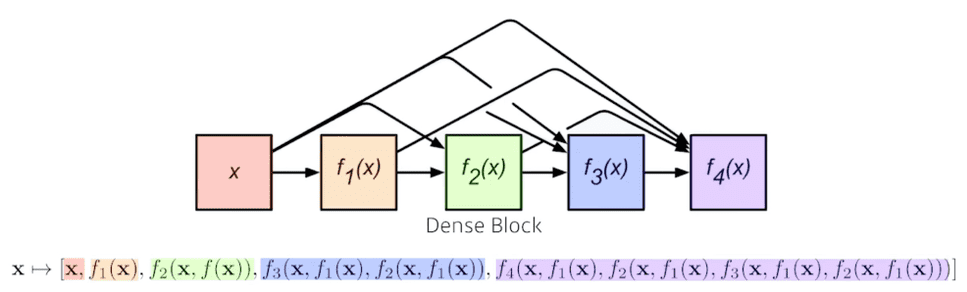
Dense Block- 각 층은 모든 이전층의 feature map을 concatenate한다.
- 채널의 수는 기하급수적으로 커지게 된다.
Transition Block- BatchNorm → 1x1 Conv → 2x2 AvgPooling
- 채널 차원을 축소한다.(Dimension Reduction)

이 글은 비밀번호로 보호되어 있습니다.